
大赛作品详情
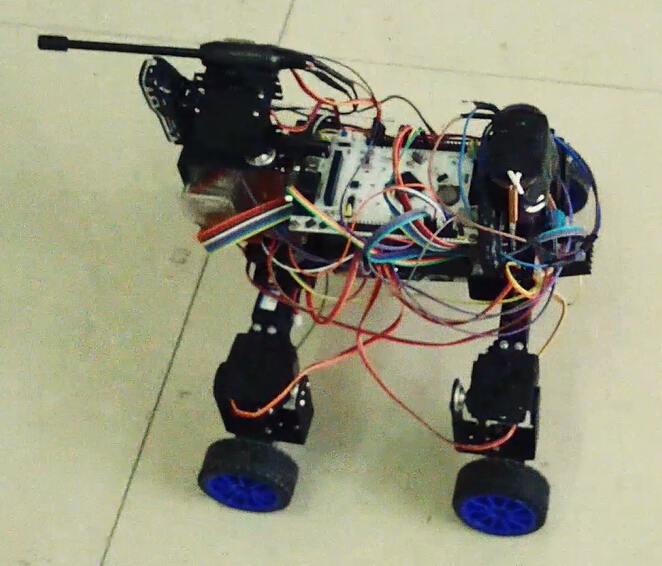
作品名称:四足轮式机器人
学校名称:山东航空学院
参赛队伍:星明科技
参赛学生:孙伟 李鑫磊 施海滨

